Hello,
Anybus.cfg (16.0 KB)
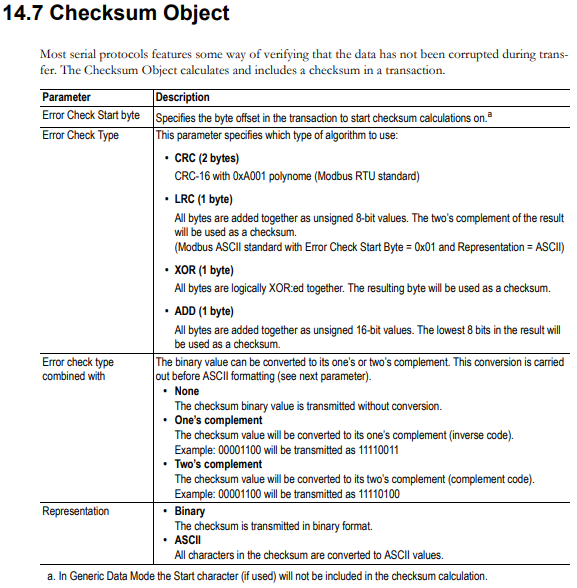
First time user here when it comes to a Anybus Product. I have the AB7072 Ethernet/IP which I am trying to communicate to a Roboclaw Brushed DC Motor Controller (see link to user manual below). My question is in regards to the checksum calculation. Page 59 of the Roboclaw manual describes how the CRC calculation needs to function. I’ve attached the config file to this post as a reference.
Thanks,
-Jon