Hello, as explained in topic
also Anybus AB7318 Comunicator CAN- Ethernet/IP Gateway (in which we are working) does not send Remote Frame as Zeus Can Protocol request prior to send data.
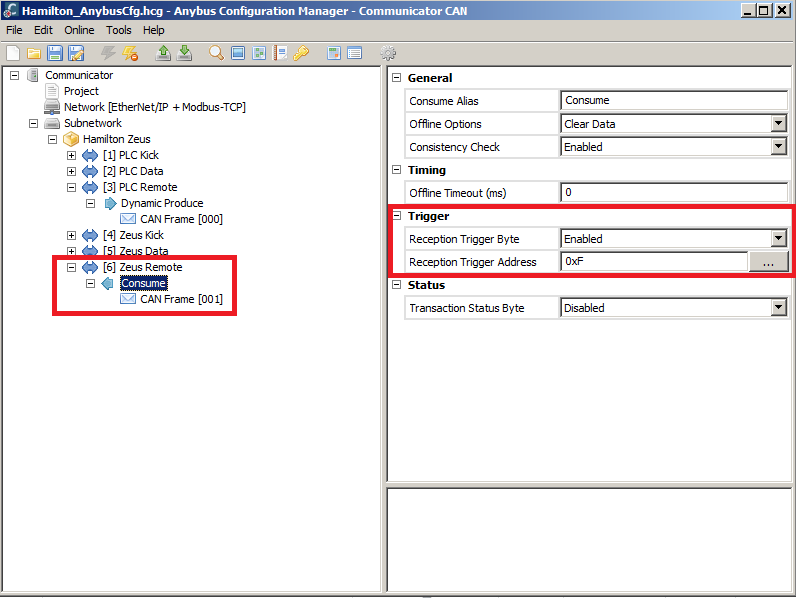
There is no problem with Initialization of the Device; Query/Response, Produce and Consume transactions run well at first stage of communication, but when a Remote Frame (RTR) is required from the Zeus Protocol to start sending data packages it is impossible.
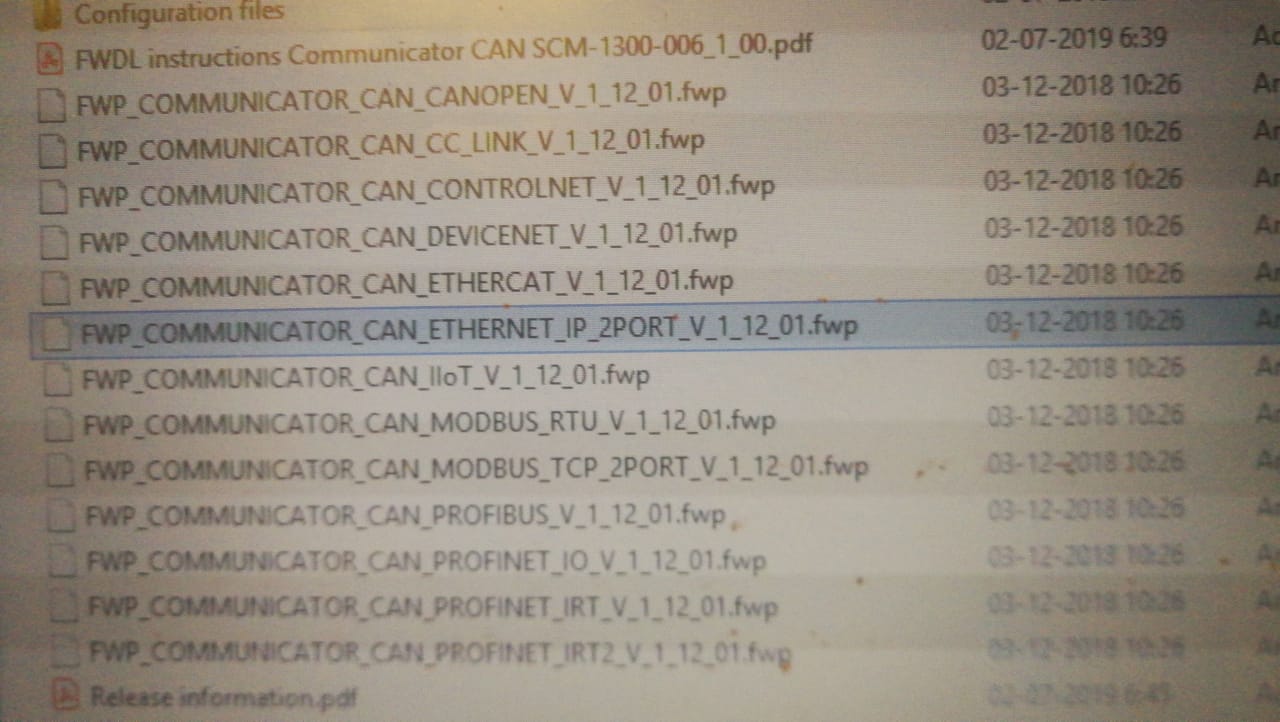
Same problem is described in the topic mentioned above as it seems to be necessary an update of firmware.
Do you have any acknowledge of this issue?
I will attach Zeus Can protocol, communication details, tests, etc.
Thanks
Alvaro