Hi,
has this been solved? I am implementing a communication protocol between an AB7318 Anybus CAN-Ethernet IP module and a Hamilton Zeus device. My problems is similar to the problem described here. I have figured out how to send a Remote Frame from Anybus to Zeus by using a dynamic produced frame (with a trigger byte). The RTR that should be set is not on bit 4 as the manual described but at bit 5 (2#0010 0000). That worked for me.
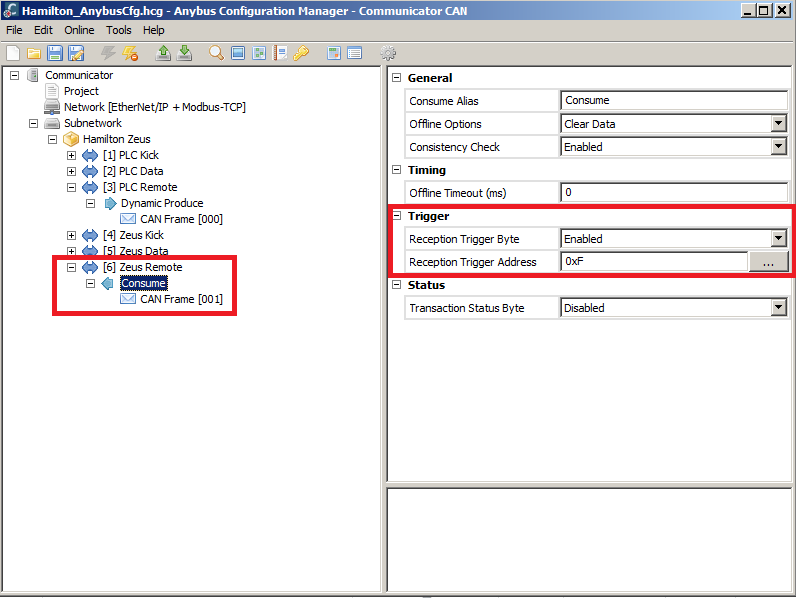
The problem that I still have left is receiving Remote Frames from Zeus. I have configured a Consume frame fom this purpose with the correct CAN-ID. When using the CAN Line Listener for monitoring, the remote frames (send from Zeus) arrive on the Anybus, but there is no way of getting this information from the Anybus to the PLC. I have tried a trigger tag, but this does not work, it is not being updated in the PLC. So at the moment, the PLC has no knowledge about Remote Frames being send from Zeus. This is important because the PLC can only send data after a Remote Frame has been send from Zeus.
Any updates regarding this issue?
Many thanks in advance.
Hans