
I am trying to get the Ethernet/IP scanner on a AB7668 configured to interface with a UR robot, but I’m having difficulty figuring out the proper configuration settings.
I have the following information from UR:
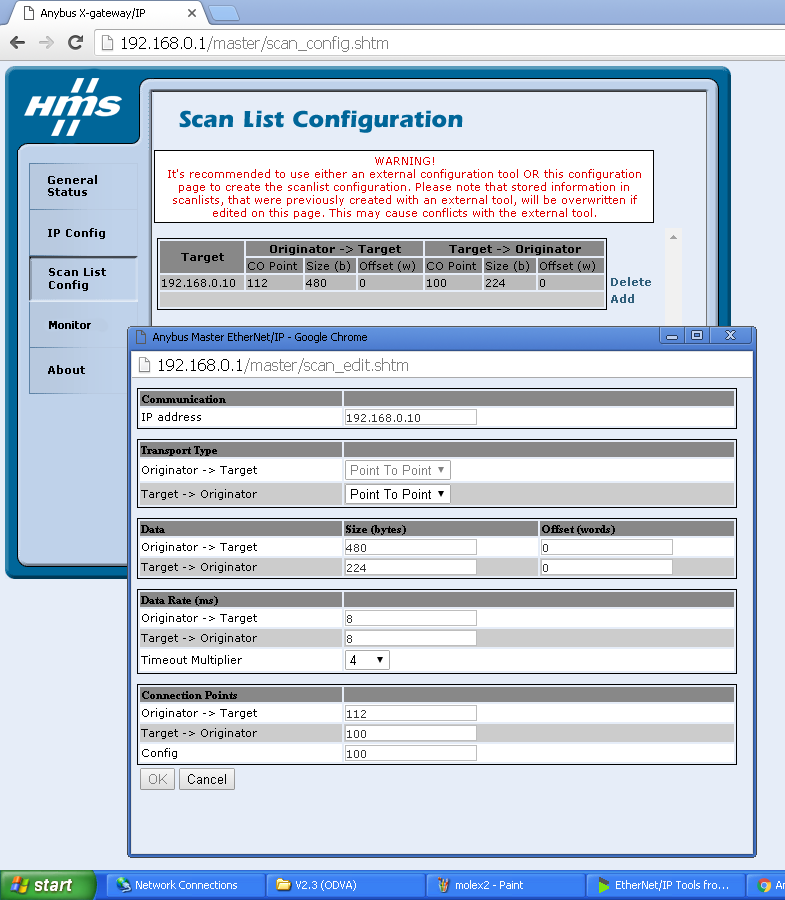
Output size(byte): 480
Input size(byte): 224
RPI: 8 [This one can be very low as we can do 2ms on the E-series]
Input Assembly: 100
Output Assembly: 112
Configuration Instance: 100
Output Run Program Header: 1 (may not need)
Input Run Program Header: 0 (may not need)
and I’ve tried to match that in the web configuration settings:
settings2.bmp (2.0 MB)
and the configuration manager
Scanner.url (132 Bytes)
I’ve tried other settings as well, but whatever settings I use I get a red blinking MS light (as opposed to the green flashing light I got when it wasn’t configured at all).
I can’t even get it out of idle mode: When I try to set Operation mode using the Anybus Manager I get

{kind=link}
Hopefully you can give me some guidance on what I’m doing wrong!