I am attempting to configure a PDO for the Anybus Gateway to display two of my transactions. Since I did not see a way to do so using the configuration menu in the Anybus Client, I have been working on using the CANbus Master to send the signals to the Anybus to make the configuration.
The following are the results:
40 02 1a 02 00 00 00 00 (read 1a02sub01)
43 02 1a 02 08 00 01 10 (1a02sub02 contains a reference to 1001asub00 with 8 bits)
23 02 1a 02 10 02 0a 21 (set 1a02sub02 to reference 210asub02 with 16 bits)
80 02 1a 02 00 00 01 06 (Object Access Error)
but the following worked to change the number of mapped values for the PDO
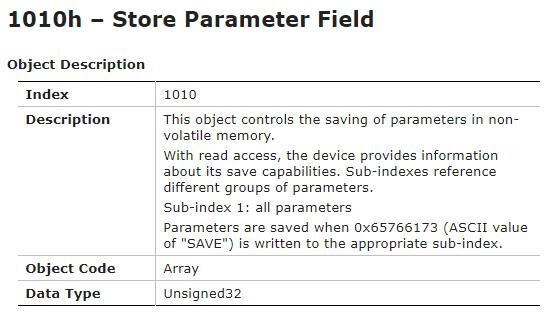
2f 02 1a 00 02 00 00 00 (set 1a02sub00 to 02
60 02 1a 00 00 00 00 (confirmation of change of 1a02sub00)
Reattempting the first commands still returned the Object Access Error. Is there a specific protocol for changing the transmit PDOs?
Thanks