Hi Kyle,
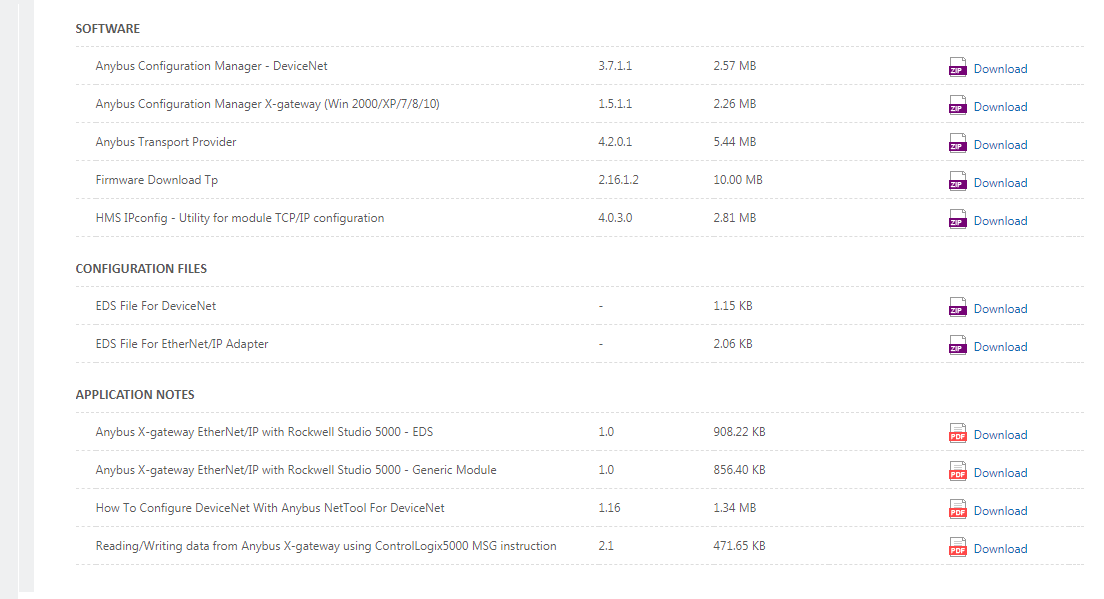
I think I am on the same page. Correct me if I am wrong; the Anybus comes with the configuration file preload and should be plug and play to a point, less IP address, I/O allocations, etc. And using the supplied documentation, I should be able to match the Device Type, Vendor ID, Product Code as well as Input/output size and Instance allocations?
In that case, I may have another issue. Looking at the Anybus documentation, I believe I have the robot EIP settings correct. I have setup several similar applications at our plant, but this one–the robot side–doesn’t want to communicate. I viewed the config file in the Anybus as well as your email, and the setting seem to match.
I will bang my head a little more on the robot config. The problem must be with the robot.
Class Attributes
Instance Attributes, Instance 01h
Status AttributeExtended Device Status
Reset Service
The Identity object provides a reset service. There are two different types of reset requests:
# Access Name Type Value Description
1 Get Revision UINT 0001h Revision 1
# Access Name Type Value Description
1 Get Vendor ID UINT Default: 005Ah HMS Industrial Networks AB
2 Get Device Type UINT Default: 000Ch Communication Adapter
3 Get Product Code UINT Default: 000Eh Anybus-S Ethernet
4 Get Revision Struct of: -
USINT Major fieldbus version
USINT Minor fieldbus version
5 Get Status WORD - Device status, see table below
6 Get Serial Number UDINT (unique serial number) Serial number of the interface
7 Get Product Name SHORT_STRING Anybus-S EtherNet/IP Name of product
Bit(s) Name Description Value Meaning
0 Module Owned - 0000b Unknown
1 (reserved) - 0010b Faulted I/O Connection
2 Configured - 0011b No I/O connection established
3 (reserved) - 0100b Non volatile configuration bad
4 - 7 Extended Device Status (See table on the right) 0110b Connection in Run mode
8 Minor recoverable fault - 0111b Connection in Idle mode
9 Minor recoverable fault -
10 Major recoverable fault -
11 Major unrecoverable fault -
12 - 15 (reserved) -
Reset Type Action
Power Cycling Reset (Type 0) This will cause the interface to emulate a power cycling reset.
Out of box reset (Type 1) This will cause the interface to delete the configuration file ‘ethcfg.cfg’ and reset.
Ethernet/IP 24
Anybus X-gateway EtherNet/IP Adapter - Modbus-TCP Server Doc: HMSI-27-251, Rev. 2.10
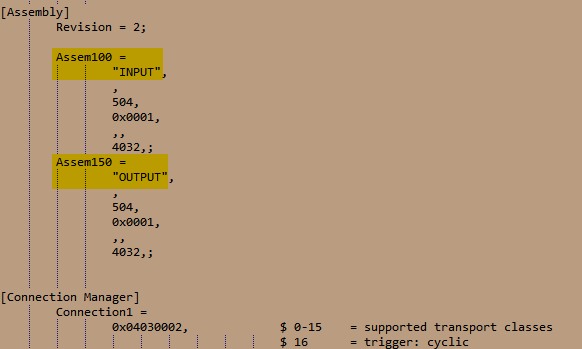
6.3 Assembly Object, Class 04h
Services
Class services: Get Attribute Single
Instance services: Get Attribute Single
Set Attribute Single
Description
The Assembly Object holds all I/O data used for I/O connections.
Class Attributes
# Access Name Type Value Description
1 Get Revision UINT 0002h Revision 2
2 Get Max Instance UINT 0096h The highest instance no.
Thank you,


{kind=link}