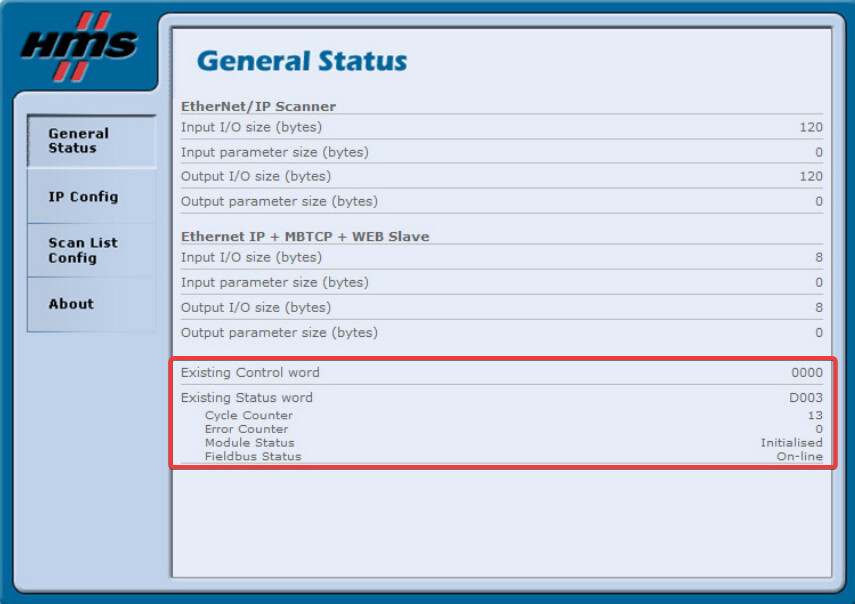
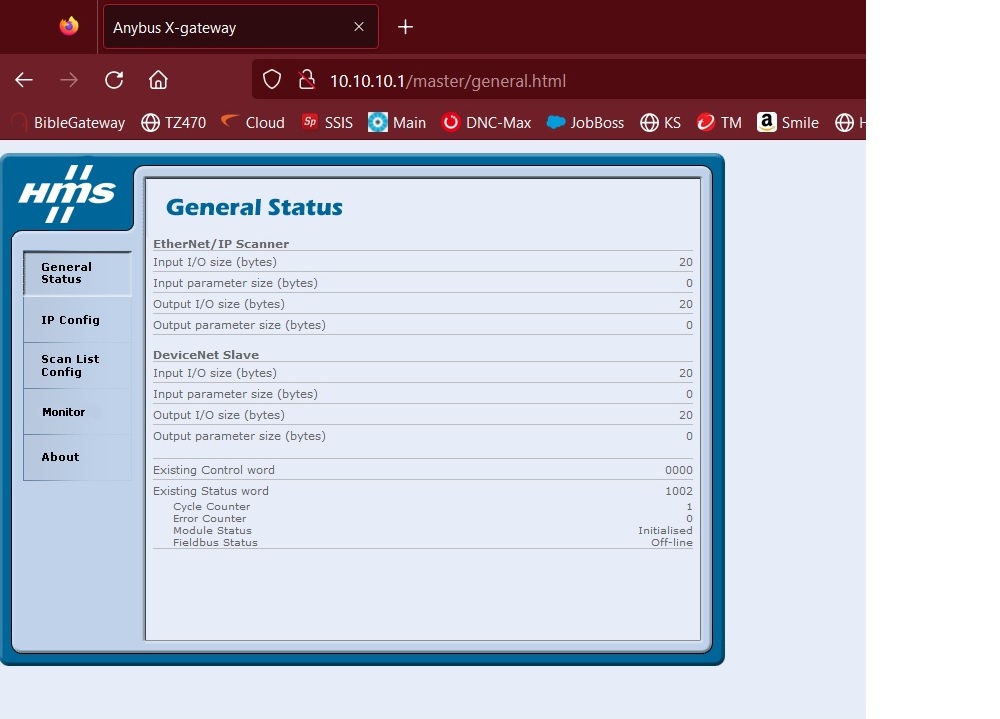
We have an AB7672-F configured for EthernetIP Master and DeviceNet Adapter. We are looking to connect a Universal Robots UR10e to an Okuma Multus for machine tending automation. The Okuma guys have worked out the connection for the Multus on the DeviceNet side and is configured via the DIP switches.
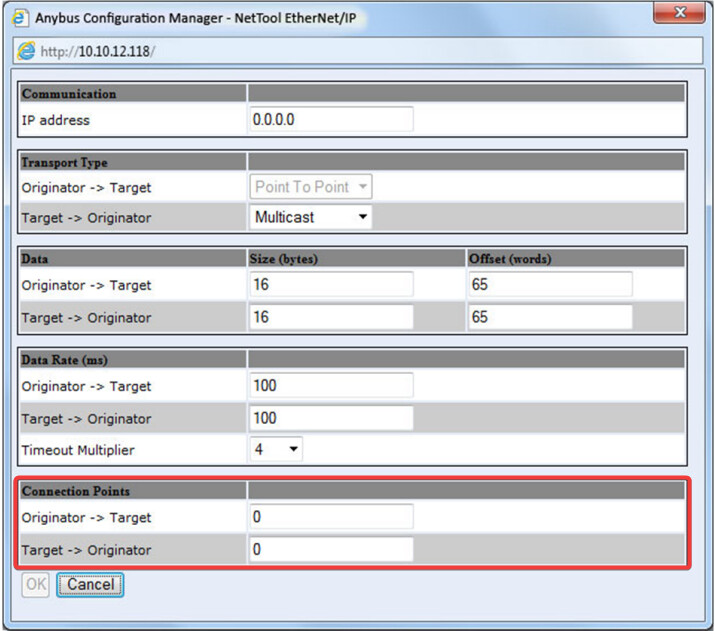
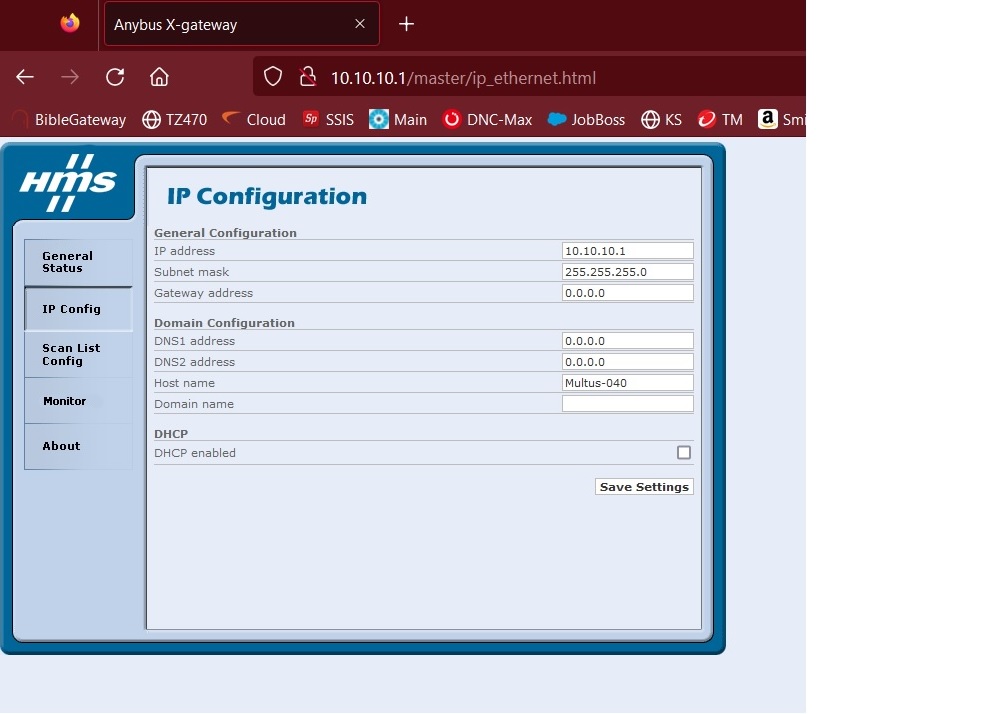
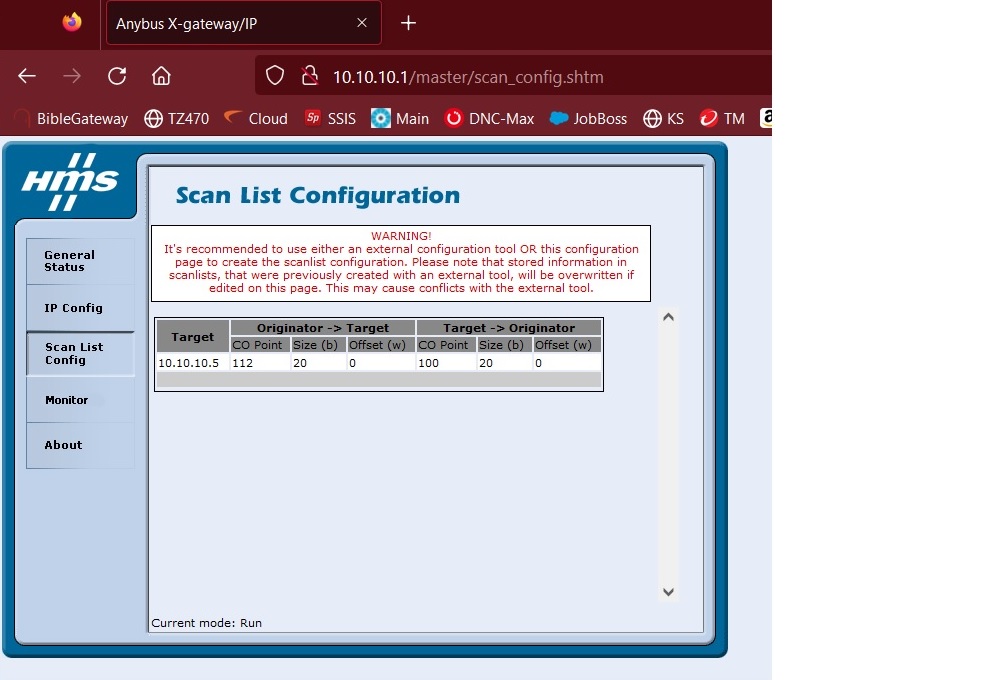
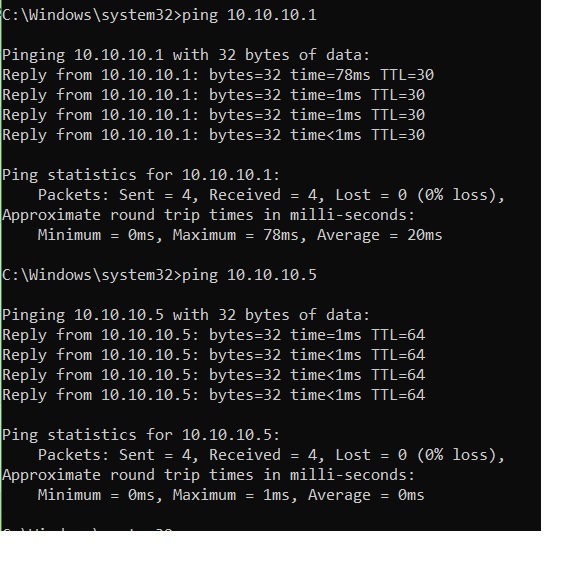
The UR control is an EthernetIP adapter so the gateway is the scanner. I’ve used HMS-IPconfig to set the IP address for the EIP side. I can ping it successfully, Is there any configuration needed using the Anybus Configuration Manager?
Where is the EDS file used? Has anyone had experience accessing the EIP IO points via Polyscope programming? This is my first run using EthernetIP.
Thanks