Hello,
I’m currently trying to communicate a Yaskawa YRC1000 controller(Ethernet) with a ServoTrack controller(Modbus RTU) using a Anybus 7072.
Im trying to read values from the YRC1000 and write them on the ServoTrack.
I’ve seen some videos, but most of them are limited to the configuration of the Anybus Device. Is there any other material i could check?
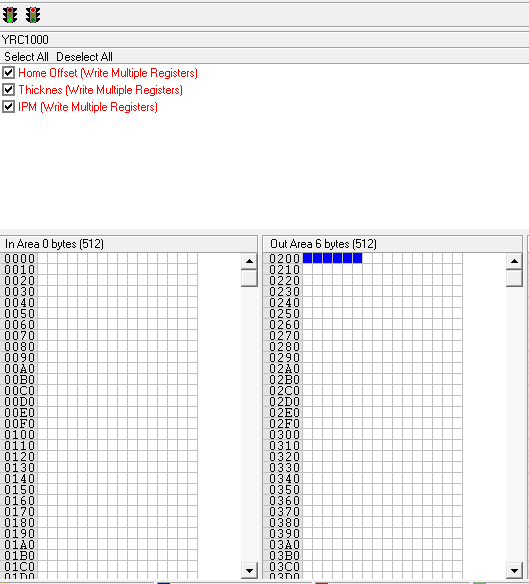
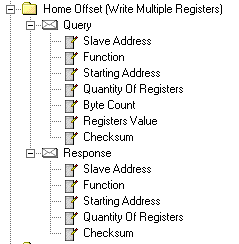
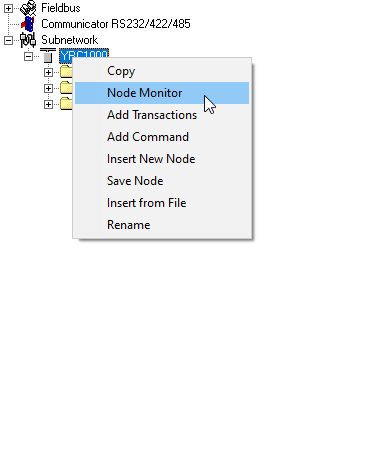
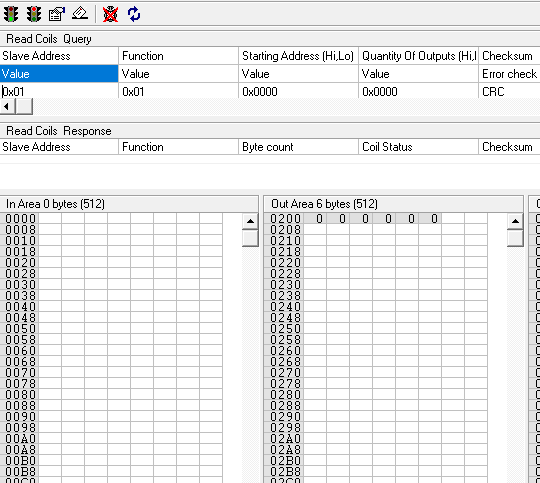
I was able to do the whole configuration. But I have no clue on where to do the whole setup for the YRC1000 on the AB7072 (Adresses, IP, etc).
YRC1000 V2.cfg (16.0 KB)