Hello,
I have a problem with the Anybus CompactCom M40 Profinet with my PIC18LF26K42 as Host using SPI communication. The application sends MOSI message, but the response of the Anybus does not seem to match expectations.
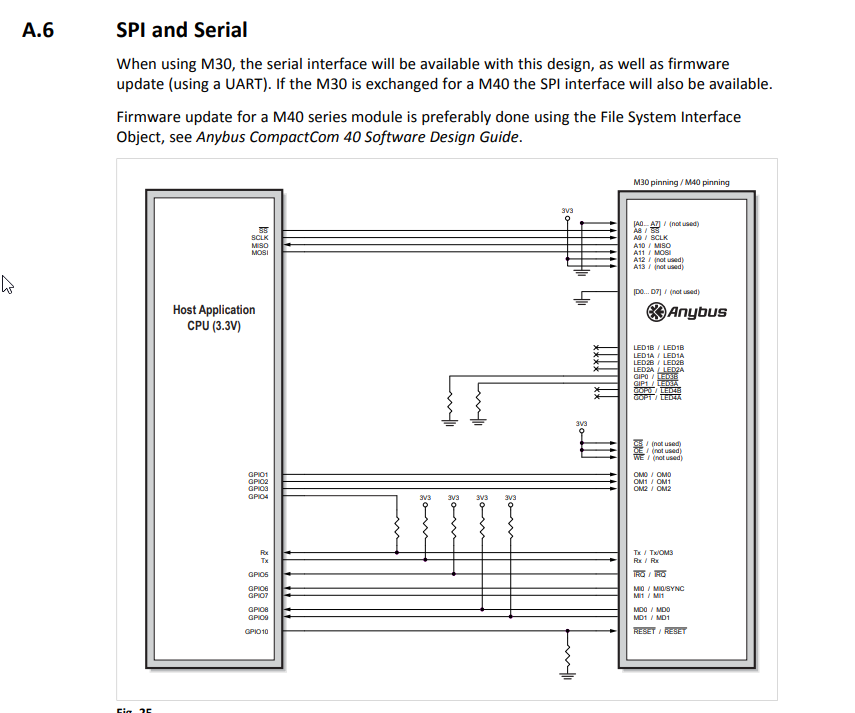
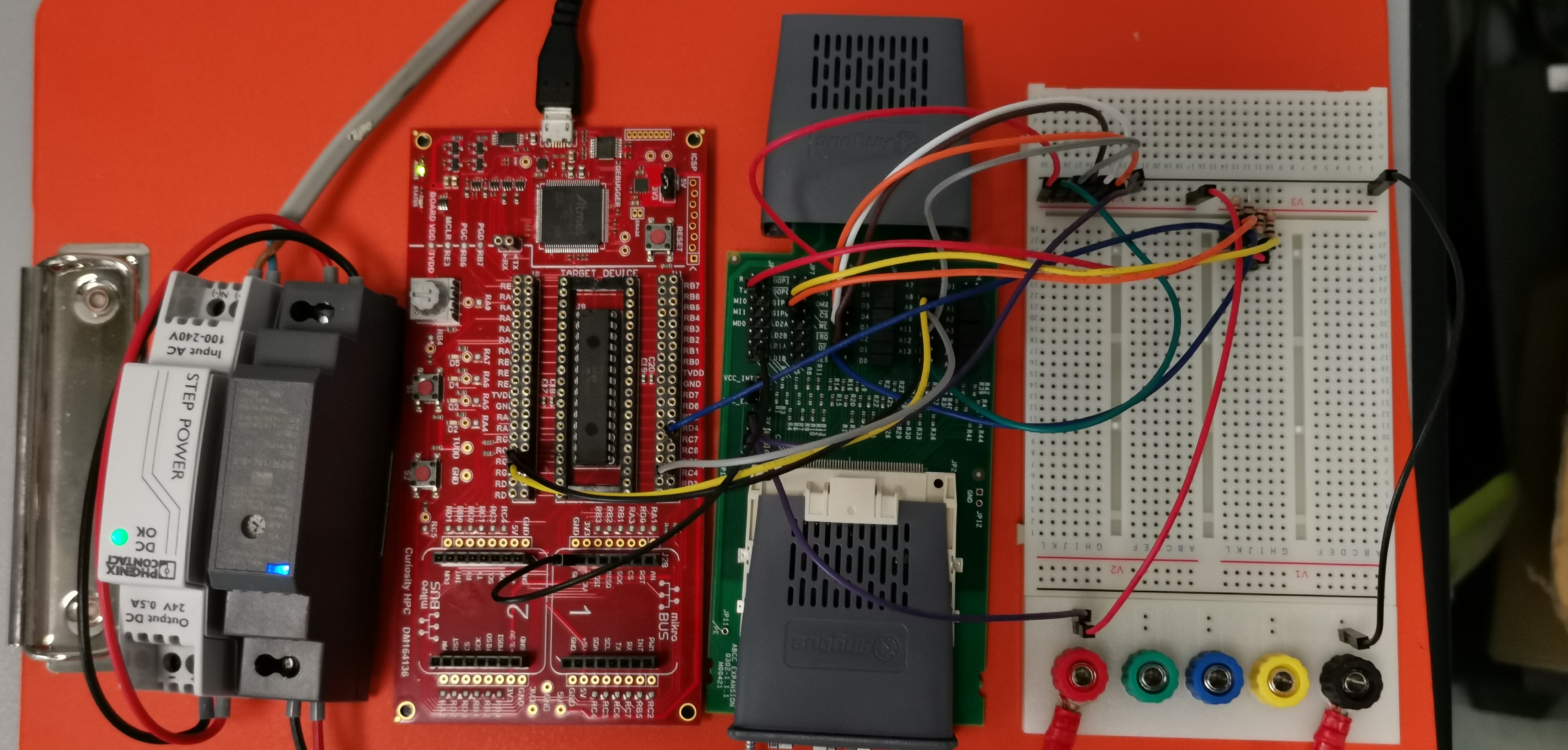
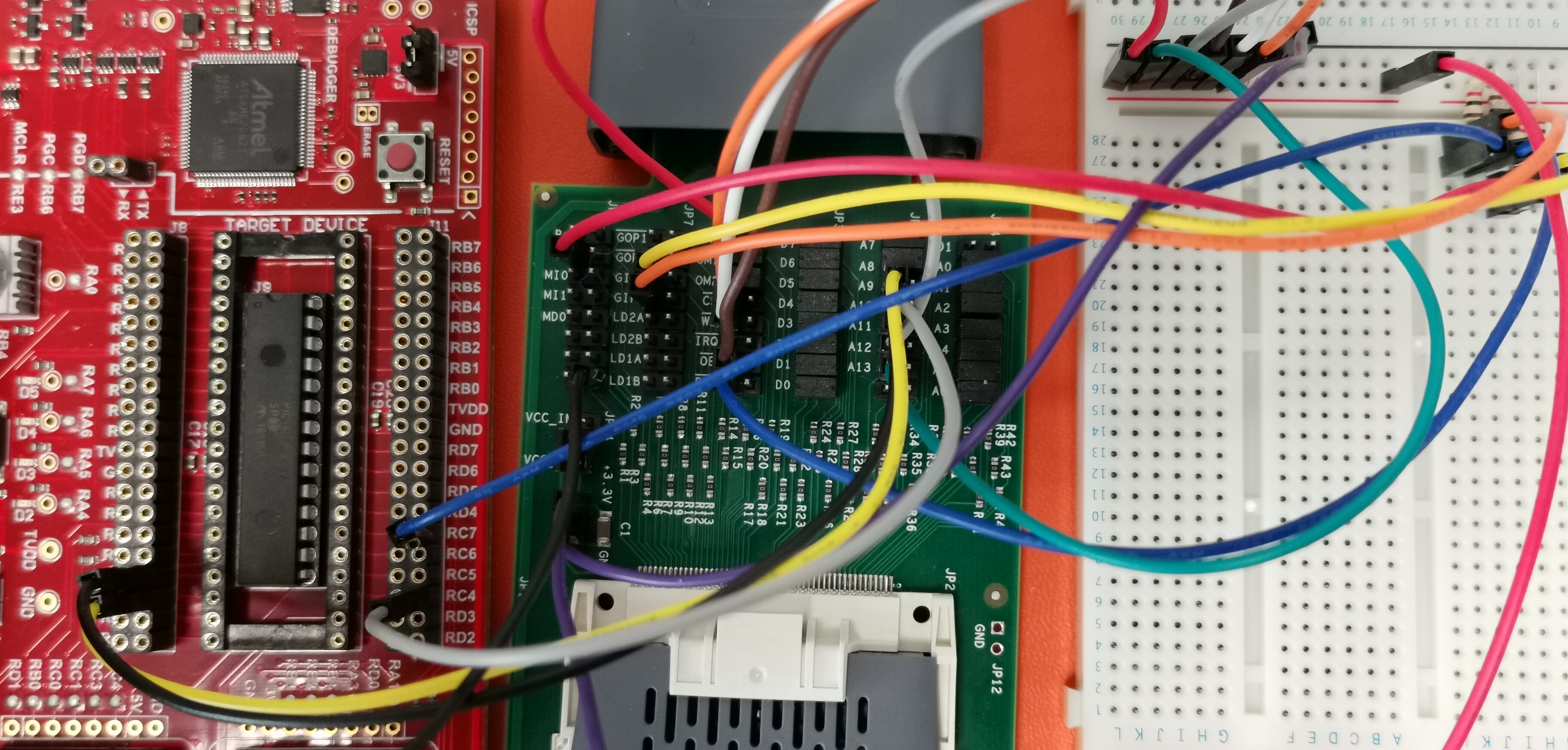
My configuration: I have connected the Anybus CompactCom M40 to the Anybus Extension Board from the Starter Kit and an external PIC processor. I am using the Generic code of the Anybus Host Application Example Code.
I have followed the Host Application Implementation Guide to configure the code and I am on Step 1 trying to get the run state…
When powering on the device, the module status LED is OFF and it remains OFF.
The MOSI frame is present on the line, verified with oscilloscope and logic analyzer.
The timings of the signal are like in Hardware Designe Guide.
SPI frequency is 200 kHz, I’ve tried with otehr frequencies with no results.
On the MISO line there is always zero, not responce from the Anybus M40 module.
Thanks for your help.